
Research Overview
My main research interests are in autonomous robotics and their application in domestic or near-domestic environments. This includes both the design and application of intelligent systems technologies to achieve goal directed autonomy, but also the practical and ethical issues surrounding human-robot interaction (HRI).
My PhD supervisors were Dr. Joanna J. Bryson (Dept of Computer Science, University of Bath) and Dr. Pejman Iravani (Dept of Mechanical Engineering, University of Bath). I remain an affiliate of the AmonI research group at Bath, lead by Joanna Bryson. Other members of the group include Andreas Theodorou, Holly Wilson and Alexandros Rotsidis.
I'm particularly interested in the various means by which we create intelligent artefacts, essentially the tools and technologies we develop in order to create artificial intelligence. Having created these new kinds of intelligent machines, I'm then subsequently interested in how humans interact with them, and what the consequences of ubiquitous artificial intelligence will be for us all. How will we live with AI, who will benefit and who will suffer? What are the risks? Should we specifically regulate the creation and deployment of AI? What can we do to enable us to use these artefacts successfully whilst minimising risk.
Instinct Planner
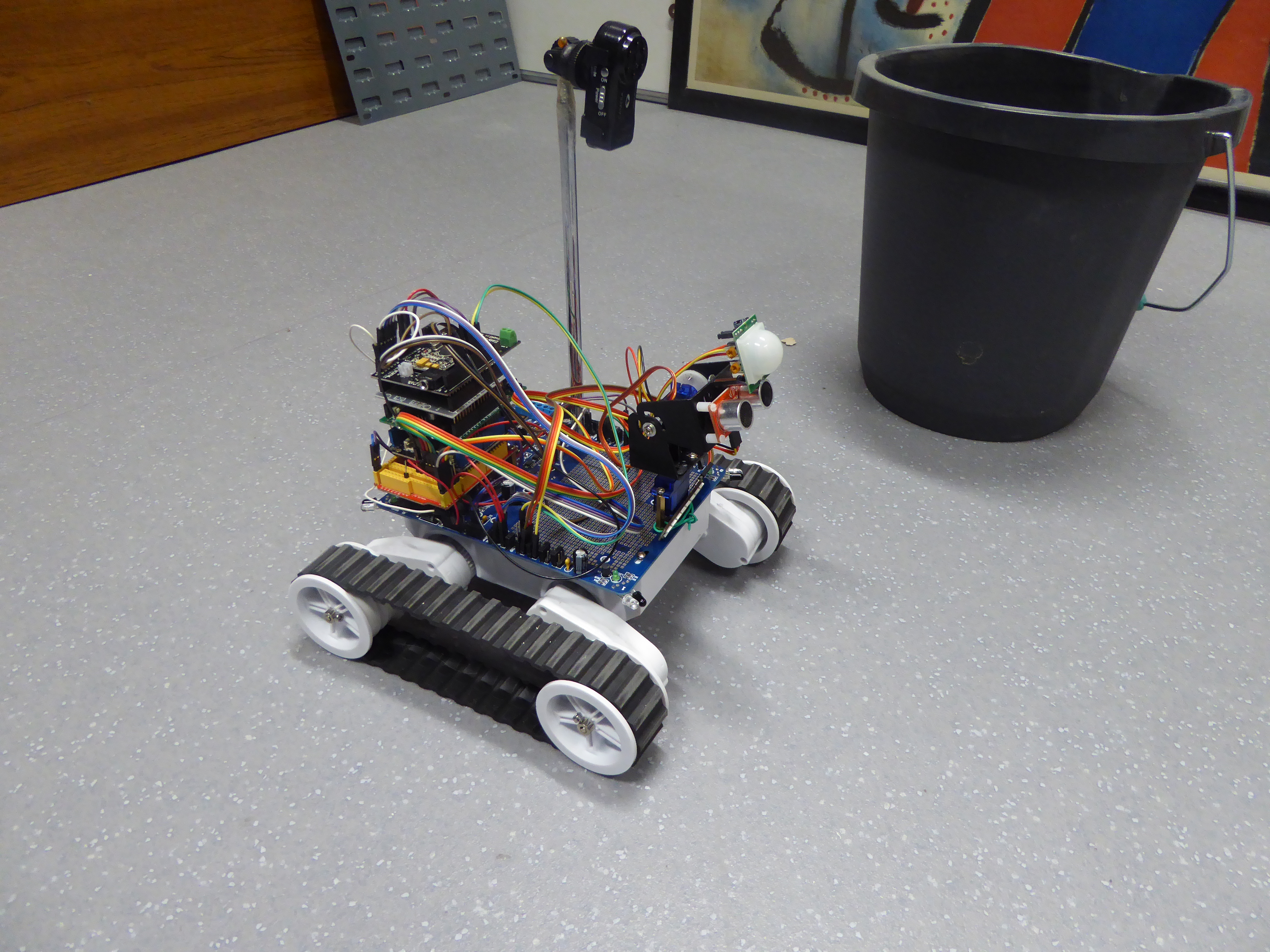 The Instinct Planner is a renew biologically inspired reactive planner, based on an established behaviour based robotics methodology and its reactive planner component — the POSH planner implementation. However, it includes several significant enhancements to facilitate plan design and runtime debugging. It has been specifically designed for low power processors and has a tiny memory footprint. Written in C++, it runs efficiently on both ARDUINO (ATMEL AVR) and MICROSOFT VC++ environments and has been deployed within a low cost maker robot to study AI Transparency. Plans may be authored using a variety of tools including a promising visual design language iVDL, currently implemented using the DIA drawing package.
The Instinct Planner is a renew biologically inspired reactive planner, based on an established behaviour based robotics methodology and its reactive planner component — the POSH planner implementation. However, it includes several significant enhancements to facilitate plan design and runtime debugging. It has been specifically designed for low power processors and has a tiny memory footprint. Written in C++, it runs efficiently on both ARDUINO (ATMEL AVR) and MICROSOFT VC++ environments and has been deployed within a low cost maker robot to study AI Transparency. Plans may be authored using a variety of tools including a promising visual design language iVDL, currently implemented using the DIA drawing package.