Back in the late 1990's, a small group of people realised that storing the year in a two digit format might cause some problems at midnight 31st December 1999. As the date flipped over from 31-12-99 to the very odd looking 01-01-00, would critical IT systems fail? After all, the date has never gone 'backwards'. … Continue Reading ››
Category Archives: Blog
Digital Trust – Trusting others in the digital realm
In 2020, I wrote about trust within the context of accountability, responsibility and transparency. You can find that content in my book, but here is a diagram outlining how trust is driven by both system and organisational transparency.
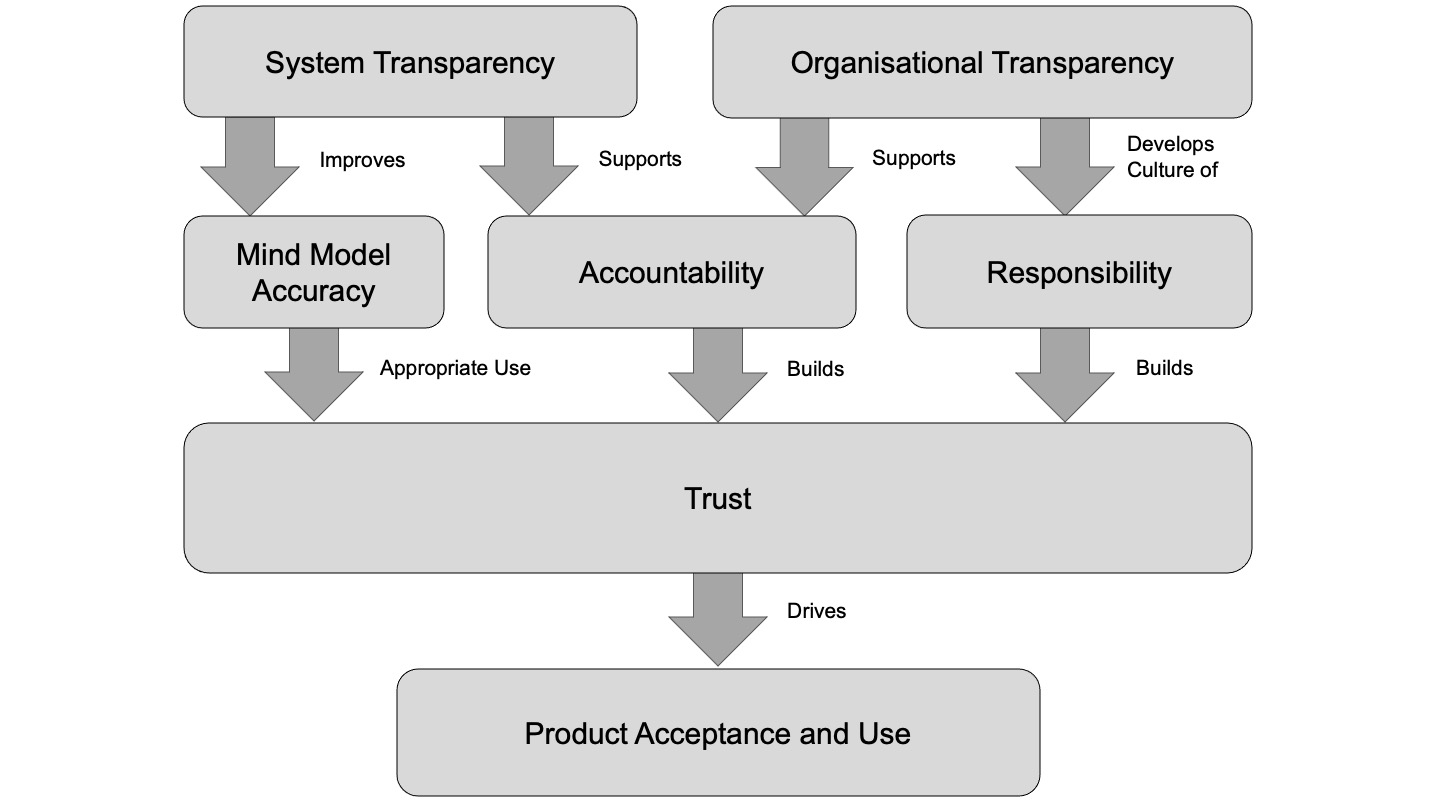 Continue Reading ››
Continue Reading ››
Moving on
Yesterday was my last day of employment at The University of Bath. I have taught Robotics and Autonomous Systems for four years, 12 Semesters. It's been a great experience, especially the contact with students in lectures, labs and tutorials. But now it is time to move on. The workload is relentless and gruelling. The last … Continue Reading ››

IET Responsible AI Webinar
Delighted to be part of the programme @IETevents new webinar series on Responsible AI, exploring cutting-edge technology and future applications over seven sessions in November and December. Booking is open now: http://ow.ly/Kcdg30rWpTu

Highlights for Academic Year 2020/21
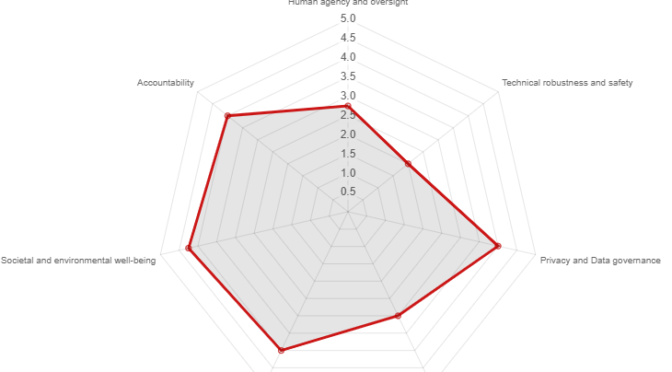
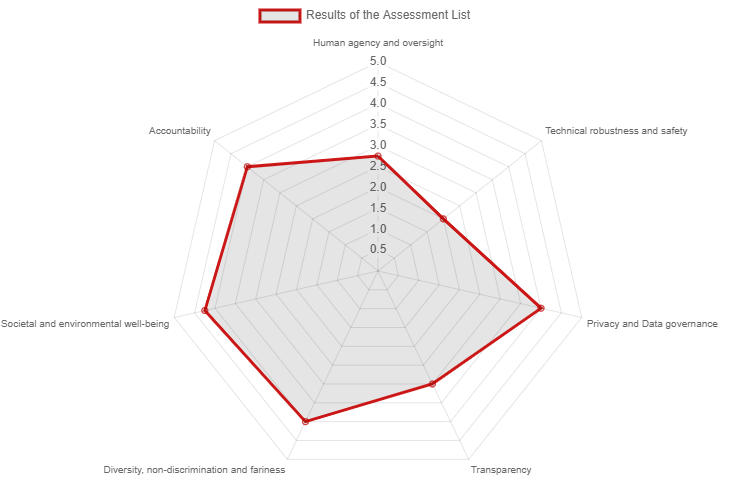
ALTAI – A new assessment tool from the High-Level Expert Group on Artificial Intelligence (HLEG)

New Book: Transparency for Robots and Autonomous Systems

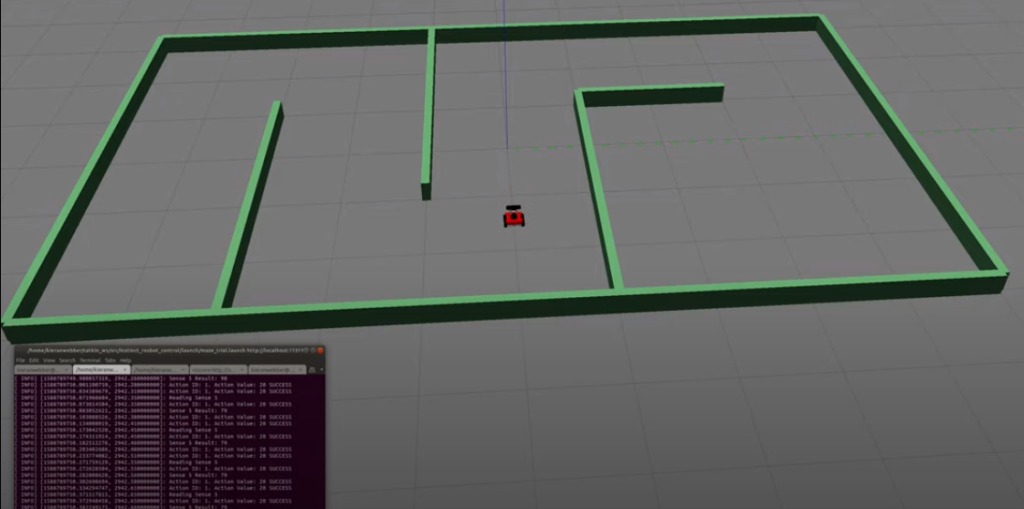
ROS-Instinct: A new reactive planner for the Robot Operating System (ROS)


Battle of Ideas 2019 – Can you build a human?
 I was delighted to be part of the panel for 'From Robots to AI: Can You Build a Human?' at the Barbican Centre in London a couple of weeks ago. Chaired by Timandra Harkness, along with … Continue Reading ››
I was delighted to be part of the panel for 'From Robots to AI: Can You Build a Human?' at the Barbican Centre in London a couple of weeks ago. Chaired by Timandra Harkness, along with … Continue Reading ››
AmonI UPDATE
Today I spent a couple of hours in hackathon mode with fellow members of the AmonI (Artificial Models of Natural Intelligence) research group at Bath . We decided it was time to bring the AmonI web pages up to date, so that the web site properly reflects our previous and current … Continue Reading ››